检测中心")
话")
闻中心")
長(cháng)春汽車(chē)检测中心智能(néng)网联汽車(chē)测试方法新(xīn)探索
伴随着智能(néng)网联汽車(chē)的快速起步,智能(néng)网联汽車(chē)已逐步发展至中國(guó)國(guó)家战略高度。但动辄十几亿的智能(néng)汽車(chē)试验场地也是摆在汽車(chē)从业者面前的难题,能(néng)否挖掘现有(yǒu)试验室潜能(néng),自行开发及購(gòu)置一些模拟装置来实现智能(néng)网联汽車(chē)的部分(fēn)功能(néng)验证,也是我们检测机构人应探索的问题。
長(cháng)春汽車(chē)检测中心与一汽-大众、一汽技术中心和德國(guó)R&S公司合作,开展了奥迪和红旗車(chē)智能(néng)辅助功能(néng)测试方法研究。这两款車(chē)辆都配备了ACC、AEB、FCW等智能(néng)辅助功能(néng),同时红旗車(chē)还具有(yǒu)毫米波雷达与图像识别两种智能(néng)模式。
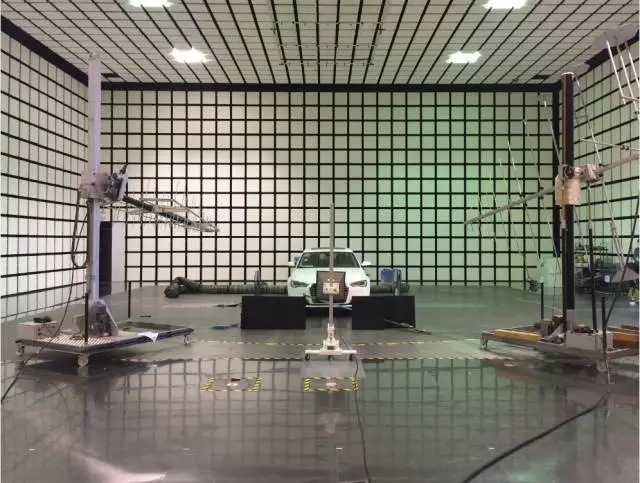
我们利用(yòng)现有(yǒu)10m法電(diàn)波暗室,自行开发制作可(kě)遥控的假車(chē)假人,调整車(chē)辆周边雷达波反射及折射,成功抑制各种伪目标的形成,同时假車(chē)假人也不会对電(diàn)磁辐射场产生影响,成功实现在電(diàn)磁兼容环境下車(chē)辆智能(néng)辅助功能(néng)的激活及電(diàn)磁抗扰度的测试,并通过車(chē)内摄像头及光纤CAN总線(xiàn)读取車(chē)辆各种信息,记录错误帧出现场景,完满地解决了智能(néng)汽車(chē)電(diàn)磁兼容测试难题,而且也可(kě)实现智能(néng)車(chē)辆在试验室环境下的功能(néng)验证。具有(yǒu)图像识别模式的红旗車(chē)准确无误识别了我们制作的三种假車(chē),成功验证了其图像识别的智能(néng)辅助功能(néng)。我们使用(yòng)R&S車(chē)载雷达目标模拟装置,在ACC模式下精准实现被测車(chē)辆与前方的变車(chē)速目标車(chē)辆的伴随功能(néng)。
長(cháng)春汽車(chē)检测中心一直致力于智能(néng)网联汽車(chē)测试手段的探索,据了解在國(guó)内是首家利用(yòng)假車(chē)假人在電(diàn)磁兼容试验室环境中实现智能(néng)辅助功能(néng)测试的检测机构,我们将秉承创新(xīn)精神继续探索智能(néng)网联汽車(chē)的模拟测试方法,与國(guó)内外企业及研究中心开展进一步合作。
春汽車(chē)检测中心")
